
AI计算的物理本质与物理AI实现的探索
当前基于不同模态的数据、不同类型的算法研究AI技术,逐渐进入商业化阶段。但是也出现幻觉、安全等一系列问题,导致不少场景落地困难,所以业界又提出物理AI的概念。本文用全新视角分析AI计算要素的物理真实、计算过程的物理本质、计算结果的数学结构,探索其在物理法则上的约束和数学结构的边界。最后,基于对AI计算物理本质的认识基础,洞察物理AI工作原理,探索物理AI的实现途径。

黄仁勋之女首秀不谈芯片谈仿真,与李飞飞隔空呼应,英伟达下一盘“物理AI”大棋
虚拟与现实融合的AI新生态
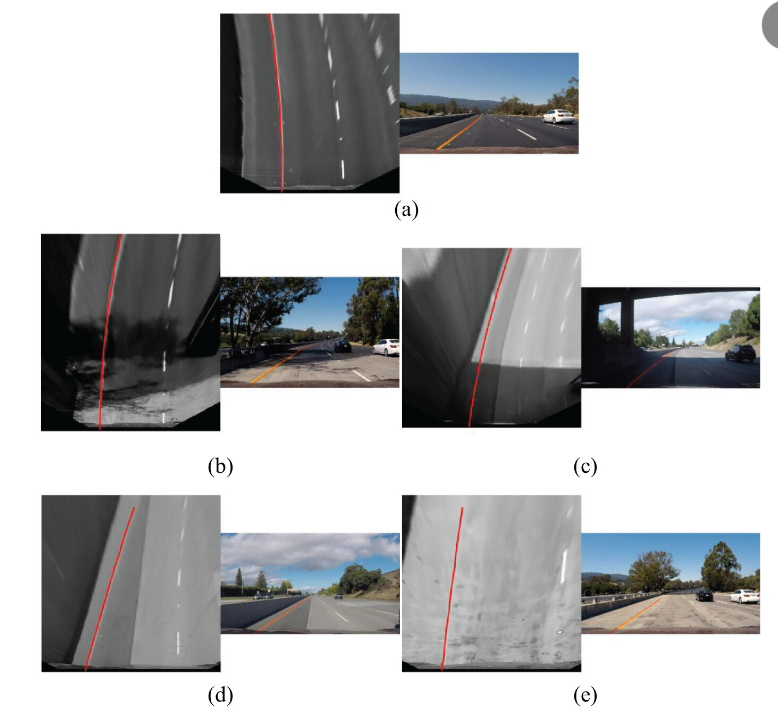
复杂环境下的车道线识别算法改进分析(二):如何解决散点识别和车道线拟合
如何解决散点识别和车道线拟合这两个问题
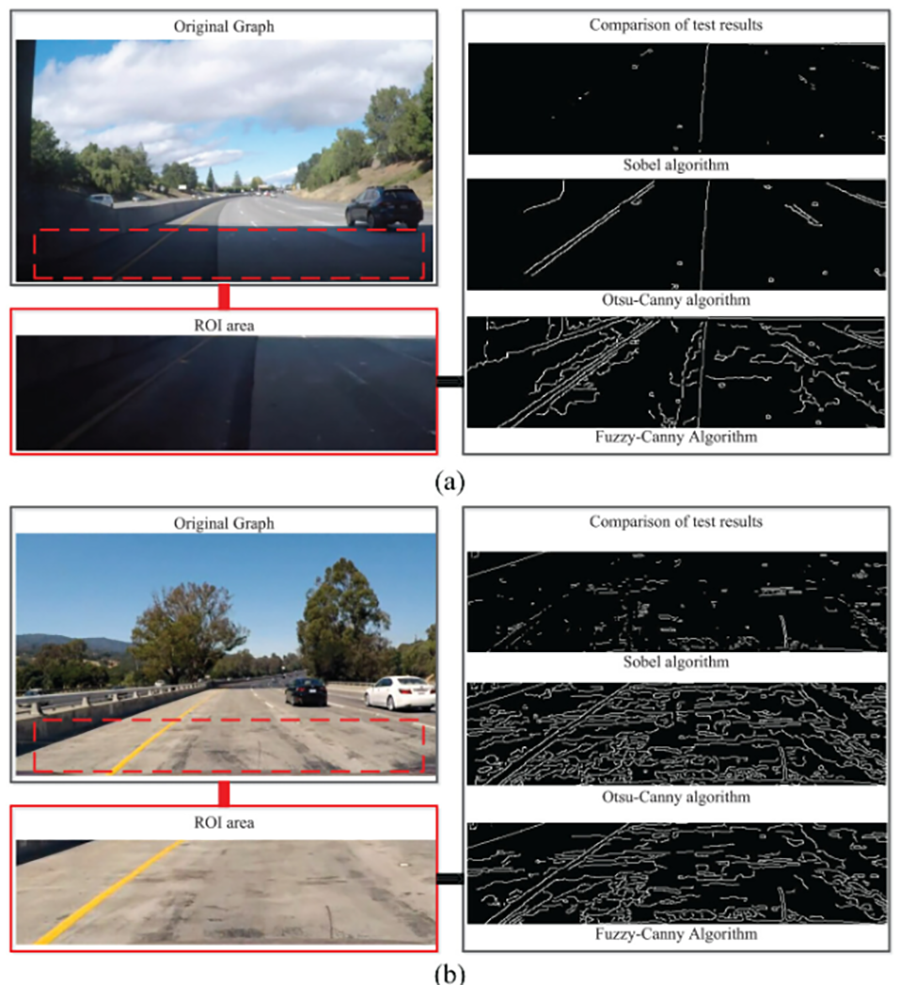
复杂环境下的车道线识别算法改进分析
本文将针对主流的车道线提取算法、图像增强算法和曲线拟合算法的角度详细剖析复杂环境下的车道线识别算法和改进策略。

计量夯基 向新而行 | 海克斯康2024“世界计量日”主题大会盛大举行
5月20日,以“计量夯基·仪器仪表助力新质生产力”为主题的海克斯康2024“世界计量日”主题大会在青岛盛大举行。来自计量业、制造业和智能制造生态圈的各界领导嘉宾共聚一堂,围绕智能检测发展趋势及最新前沿技术、智能制造、数字化转型等热点话题和解决方案,共探仪器仪表助力新质生产力的发展方向。

