
硬核实力全球认可,速腾聚创蝉联摩根士丹利人形机器人双榜
2026年5月7日,摩根士丹利发布《Humanoid Horizons: Money Meets Machines(人形机器人前沿报告:资本与机器交汇)》,速腾聚创再度入选“全球人形机器人产业链百强”,并同时被收录于“中国人形机器人价值链”图谱,成为全球激光雷达领域唯一一家同时跻身两大产业图谱的中国科技企业。

2025年商清环卫机器人市场速腾聚创激光雷达销量第一
速腾聚创以71%的市占率保持统治地位

RoboSense速腾聚创CES 2026展开AI机器人生态全景蓝图:具身机器人突破 合作客户覆盖各行各业
RoboSense速腾聚创在2026年国际消费电子展(CES)上迎来其连续第十年参展的重要里程碑,并以AI机器人的全球首秀,展示了在具身智能领域的突破性成果。
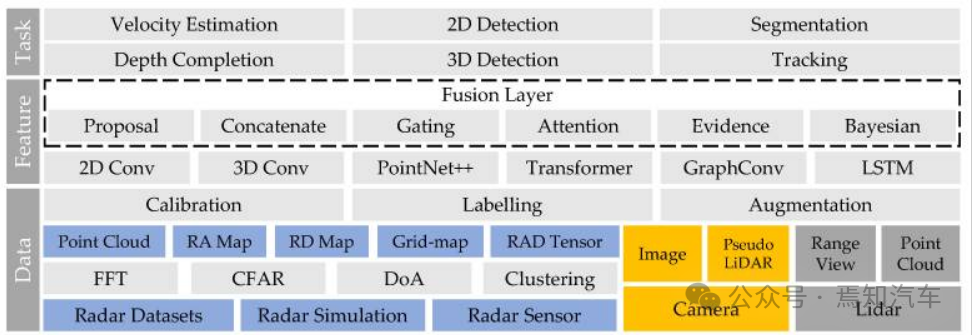
基于深度学习构建4D Radar的环境感知算法解决智驾Corner Case
通过将深度雷达检测器分为基于点云的和基于预CFAR的PointNet变体网络。

全面介绍一下深度学习下的Radar感知融合策略及研究方向
总结了深度雷达感知的最新进展

基于模型的自动驾驶汽车端到端深度强化学习策略
真实驾驶场景中,通过观察和互动,使智能驾驶汽车能够积累知识并应对不可预测的情况。

禾赛发布2024 Q1财报:交付量同比增长近7成,获全球量产车型定点
近期,禾赛重磅发布小巧型高性能远距激光雷达 ATX。ATX 搭载第四代芯片架构,全面升级了光机设计和激光收发模块,实现了小巧体积与强劲性能的完美结合。
牵头行业标准,拓展海内外市场,坚持“国产化超越” 楚航科技巩固毫米波雷达行业领先地位
楚航科技亮相2024北京国际车展,全面展现品牌最新的产品与技术阵容,包括已实现国产化替代的全线第五代迭代版量产雷达产品,以及第六代创新雷达产品及技术。

